Ornithopter
Apr 12, 2024· ·
1 min read
·
1 min read
Jialong Ning
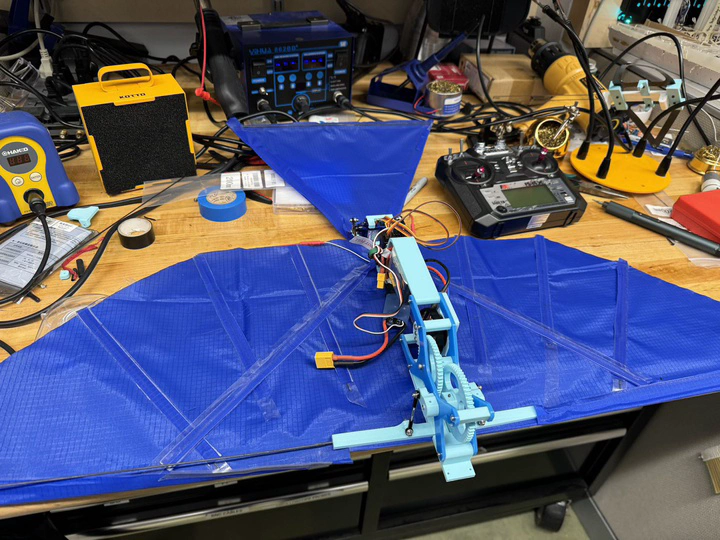 Image credit:
Image credit:Welcome 👋
Overview
- Designed an ornithopter robot using a bistable wing mechanism and compared its performance with an ornithopter featuring a traditional rigid wing structure.
- Developed the power transmission system, selected the motor, and used 3D printing, laser cutting, and waterjet cutting to manufacture a physical gearbox. Installed the bistable wing and conducted tests to verify its feasibility.
- After six iterations, built a complete ornithopter and finalized the control scheme: a FlySky transmitter and receiver for control, a LIPO battery as the power source, and an ESC to regulate the BLDC motor speed. A servo motor was included to adjust the tail angle for turning.
- Conducted flight tests on the single-stable wing version first due to its simpler control characteristics, ensuring the mechanical structure and power systems were suitableove durability.
- Reinforced damaged components to improve structural integrity.
- Tested the lift generated by the wings, providing quantified data as a theoretical basis for the ornithopter’s flight capability.