Dataset for multi-degree-of-freedom robotic
Oct 25, 2024· ·
1 min read
·
1 min read
Jialong Ning
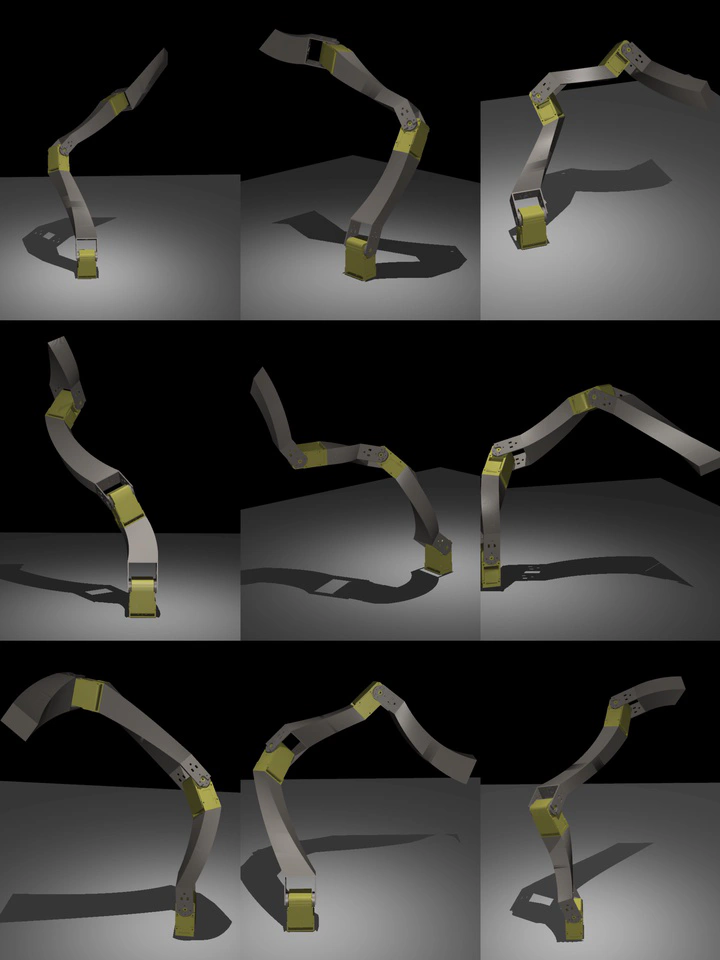 Image credit:
Image credit:Overview
- We plan to build a dataset for multi-degree-of-freedom robotic arms, with the goal of training a model that takes videos of robotic arm movements as input and outputs the corresponding URDF file.
- I generated the link in Fusion 360, using DH parameters to determine the link’s shape. A spine curve was used as the baseline, and the link was created with the loft function, then saved as an STL file.
- Since the loft function failed to generate the link for certain DH parameters, I switched to using dual quaternions. This method produced smoother curves and was capable of handling any DH parameter.
- I modified the DH parameter generation range to reduce the occurrence of oddly shaped links. Additionally, I optimized the link generation process to minimize excessive twisting caused by large theta values.
- I wrote a program that automatically selects appropriate links to assemble into a robotic arm and generates the corresponding MJCF files for visualization in MuJoCo.